NVIDIA公布2023年度创新应用:机器人设计成焦点
▍2600万美元C轮融资 Soft Robotics采用mGripAI解决方案提升分拣效率
美国马萨诸塞州的Soft Robotics公司日前宣布已获得2600万美元C轮融资,此轮融资后。该公司计划利用资金扩大mGripAI的商业部署。据了解,自成立以来,Soft Robotics已累计融资达到8600万美元。
Soft Robotics是一家由哈佛大学George M. Whitesides博士于2012年创立的科技公司,总部设在距离波士顿约20英里的地方。该公司的宗旨是利用独特的软体机器人抓取、3D机器视觉和人工智能软件等技术,为全球食品行业提供一套自动拣选解决方案。
据了解mGripAI是Soft Robotics开发的自动化软件包,它结合了3D视觉和人工智能技术,使工业机器人具备了“手眼”协调能力。目前mGripAI解决方案已经广泛应用于食品加工过程中
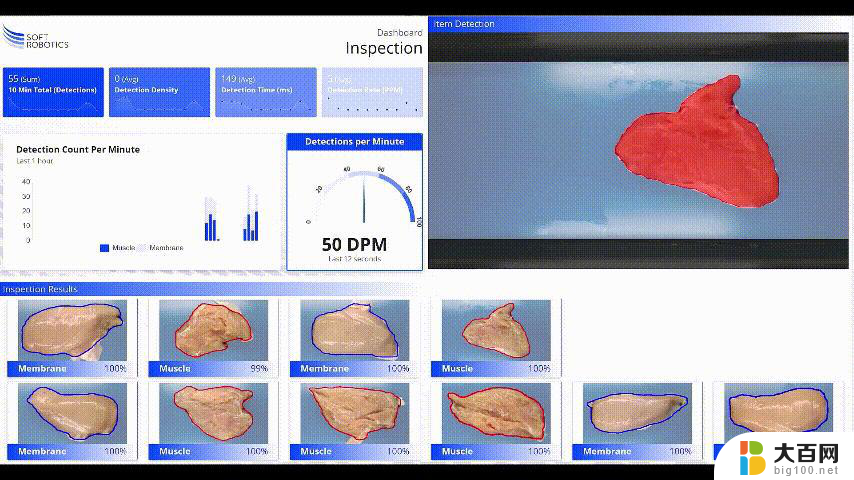
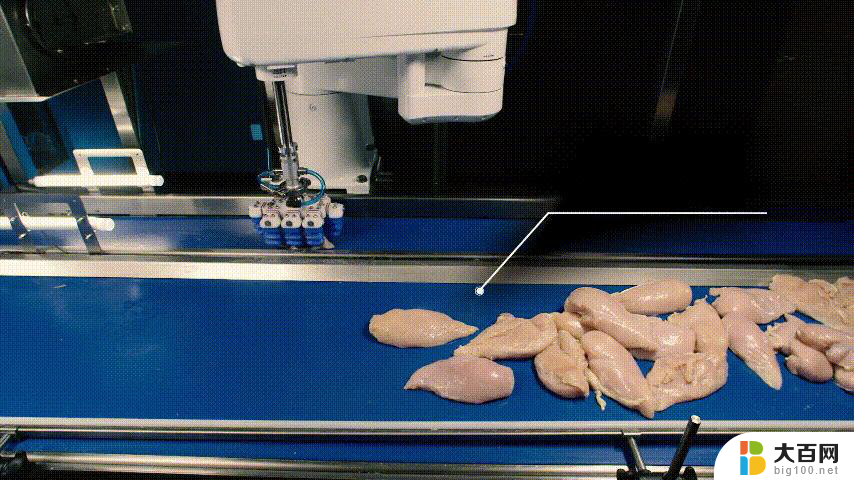
Soft Robotics使用NVIDIA Omniverse平台和NVIDIA Isaac Sim 机器人模拟器来创建传送带上或箱子中鸡肉部分的 3D 渲染。借助 AI 和 NVIDIA RTX技术的光线追踪功能,即使在眩光或光线变化的条件下,机器人夹具每分钟也能处理多达 100 次抓取。
此外,mGripAI还具有实时跟踪物体、提高分拣精确度以及抓取优化、智能机器人运动控制和嵌入式对象理解等功能。
▍台湾达明TM25S协作机器人采用数字孪生进行自动化检测
台湾著名电子制造商广达正在进行工厂的数字化转型,其车间采用了来自台湾达明公司提供TM25S智能协作机器人进行产品质量的自动化检测。
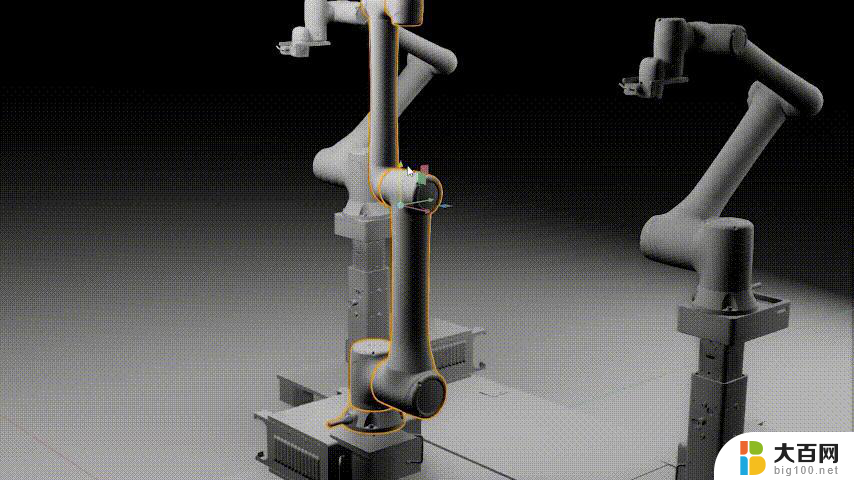
达明机器人使用英伟达Omniverse平台,在Isaac Sim中构建了检查机器人以及待检查产品的数字孪生,相比真实机器人的if……else手动编程,使用该方法可减少70%以上的作业时间。
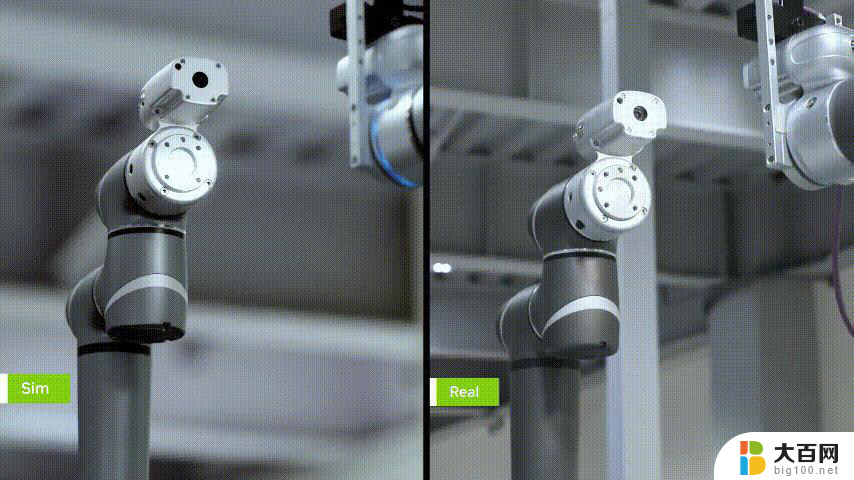
达明机器人利用Isaac Sim中的优化工具,在NVIDIA GPU上进行了大量的模拟程序测试,用于产品质量环节的检测,最终结果如视频所述,这是一个相对成熟的解决方案,通过数字孪生方案,每次检查周期缩短20%。
▍加州理工大学变形轮式机器人M4未来应用火星探索
今年7月,加州理工学院、喷气推进实验室和美国东北大学联合研发了一款多运动模式、移动可变形机器人M4。该方案采用轮式机器人结构设计,可利用高机动性迅速抵达和降落在常规机器人无法进入的地带。未来将广泛应用于无障碍伤员运送、数字农业等场景。M4的M42版本目前正在NASA中研发,有望成为火星探测任务的候选机器人。
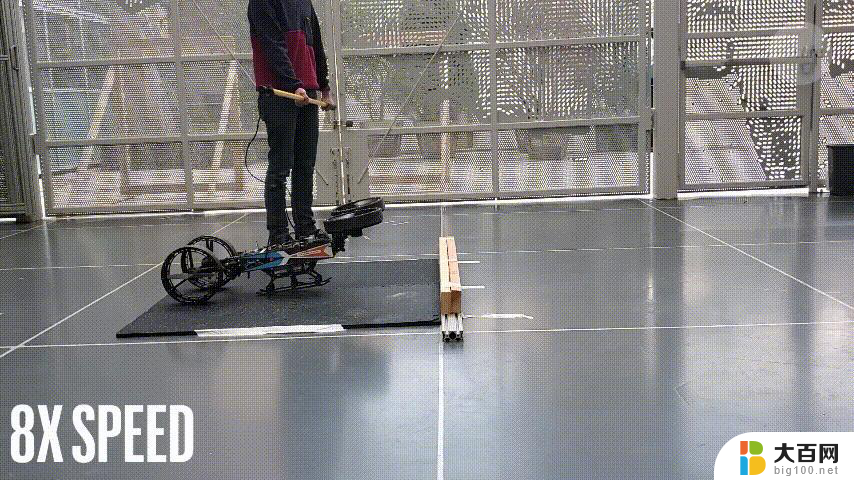
M4重约6千克,推力约9kg,轮子直径约30厘米,机身搭载底层控制和数据收集的机载计算机,传感器(编码器,惯性测量单元,立体相机)、用于远程操作的通信设备、关节执行器、推进电机、电力电子设备和电池。
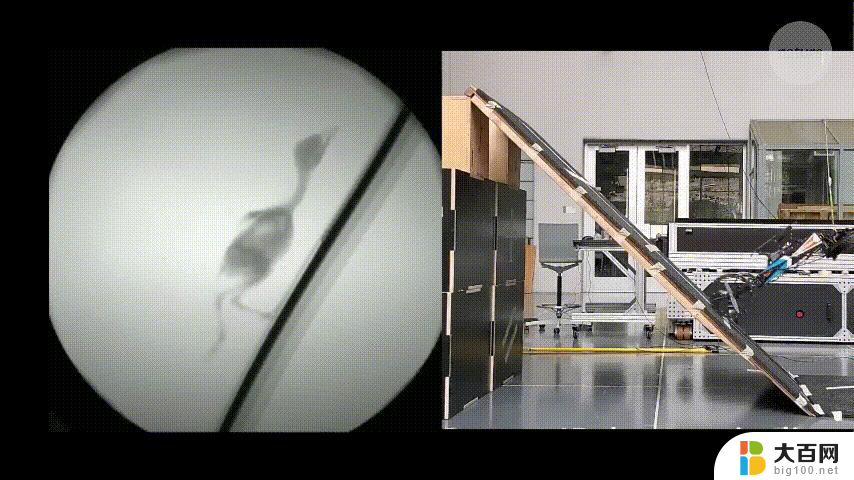
M4变形机器人搭载了用于边缘 AI 和机器人的 NVIDIA Jetson 平台,用于构建可变性无人机的解决方案。通过该方案,M4机器人可实现多达八种运动姿态:包括飞行、滚动、爬行、下蹲、平衡、翻滚、侦查、局部操作等动作。
目前,M4的飞行速度为每小时 40 英里,充一次电后可持续飞行30分钟。该团队正在努力设法设计出飞行时间更长、有效载荷更大、飞行距离更远的大型无人机。
NVIDIA公布2023年度创新应用:机器人设计成焦点相关教程
- NVIDIA在2023亚马逊云科技re:Invent发布回顾:聚焦亮点
- 4.9 显卡行情 | 英伟达5090和5080预计今年第四季度发布,最新显卡发布时间及性能一览
- 微软AI PC落地,AI加速换机成关注焦点
- Nvidia的历程:从世嘉Dreamcast到科技巨头,探索Nvidia公司的成功之路
- 微软公布2025财年一季度财报:营收突破655亿美元,业绩稳步增长
- NVIDIA GeForce 256发布25周年:纳斯达克庆祝世界首款GPU诞生
- NVIDIA垄断GPU市场20年,无人能敌
- 2023年全球十大芯片设计厂商排名揭晓:英伟达荣登榜首,韦尔半导体跻身前十!
- NVIDIA初创企业半程展示成功收官,七场分站展示吸引超200人参会
- 2023年Nvidia RTX 4070显卡是最值得购买的:全面评估、性能提升和未来技术的综合考量
- 国产CPU厂商的未来较量:谁将主宰中国处理器市场?
- 显卡怎么设置才能提升游戏性能与画质:详细教程
- AMD,生产力的王者,到底选Intel还是AMD?心中已有答案
- 卸载NVIDIA驱动后会出现哪些问题和影响?解析及解决方案
- Windows的正确发音及其读音技巧解析:如何准确地发音Windows?
- 微软总裁:没去过中国的人,会误认为中国技术落后,实际情况是如何?
微软资讯推荐
- 1 显卡怎么设置才能提升游戏性能与画质:详细教程
- 2 ChatGPT桌面版:支持拍照识别和语音交流,微软Windows应用登陆
- 3 微软CEO称别做井底之蛙,中国科技不落后西方使人惊讶
- 4 如何全面评估显卡配置的性能与适用性?快速了解显卡性能评估方法
- 5 AMD宣布全球裁员4%!如何影响公司未来业务发展?
- 6 Windows 11:好用与否的深度探讨,值得升级吗?
- 7 Windows 11新功能曝光:引入PC能耗图表更直观,帮助用户更好地监控电脑能耗
- 8 2024年双十一七彩虹显卡选购攻略:光追DLSS加持,畅玩黑悟空
- 9 NVIDIA招聘EMC工程师,共同推动未来技术发展
- 10 Intel还是AMD游戏玩家怎么选 我来教你双11怎么选CPU:如何在双11选购适合游戏的处理器
win10系统推荐
系统教程推荐
- 1 win11很多文件打不开 win11文件夹打不开的解决方法
- 2 win11服务在哪开 如何在win11中打开服务
- 3 微信聊天文件在win11c盘哪个位置 怎样找到电脑微信保存的文件
- 4 win11如何打开网络共享设置 Win11轻松分享文件和资料
- 5 win11任务栏底部不合并 win11任务栏怎么调整不合并显示
- 6 win11关机怎么把仍要关机 取消 Win11自动关机怎么取消
- 7 win11文件夹加密 其它用户还是能打开 Win11 24H2共享文档NAS无法进入解决方法
- 8 自定义分辨率 win11 win11如何设置自定义分辨率
- 9 win11系统卡死机 Win11开机卡死在桌面解决方法
- 10 win11装不了dotnet3.5 win11 netframework3.5安装不了怎么解决